Cette année, les devoirs de vacances sont sérieux

Les mouches n'ont qu'à bien se tenir...
l'ours a écrit : ↑lun. 22 juil. 2024 19:12
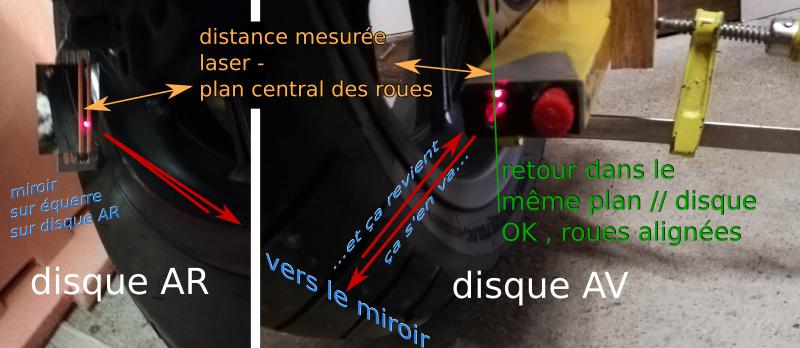
... valider le parfait alignement de la roue AV en prenant pour référence… la roue AR, ...
Désolé, j'ai pas tout remis dans le dernier schéma, mais la roue AV est déjà alignée (voir milieu page 3, "1 Alignement approximatif roue AV sur roue AR") et ça n'a pas besoin d'être parfait (schéma fin de page 2, "pour les premiers degrés, le cosinus d'un angle varie peu").
Si on retouche les tendeurs sur l'axe AR, on peut revérifier l'alignement de la roue AV sur l'AR...
"
Comment être certain que les mesures D et G sont parallèles ?"
Pointeur en appui sur le pneu (alternativement à D et à G), on aligne le plan milieu des flancs avec le milieu de la cible.
Et oui, un pneu n'est pas parfait, Gipsvar l'a rappelé. J'ai vérifié patiemment le faux-rond sur mon pneu AR, la dérive latérale du laser sur la cible va de -1.5mm à +1.5mm. Ça me va. Pour plus de précision, prendre appui sur la jante.
"
Cible perpendiculaire", meilleure est la perpendiculaire, meilleure est la précision, mais c'est comme le bon alignement de l'AV sur l'AR, "pour les premiers degrés etc.".
"
le pointeur laser n’est appliqué que sur une seule partie de la circonférence de la roue"
Voir la première photo, page 2. Appui sur le flanc du pneu, assez bas pour passer vers l'avant. Ça me paraît relativement stable.
"
Mesure d'1 seul côté, précision nécessaire ?". Oui, c'est la façon la plus facétieuse, appui sur les 2 disques, donc du seul côté D. Se rajoute le problème de l'état des disques, et ça m'a paru moins simple à mettre en œuvre. Quelques photos à suivre.
"
En conclusion, à ce stade du projet...". Mais ce n'est pas un projet, c'est une bonne révision, une comparaison entre quelques façons de faire, avec ma vision personnelle.
Je te devine sceptique, pas de souci, d'autant que tu dois te débrouiller... à ta façon. Il faudrait d'ailleurs faire un sondage sur les méthodes utilisées. Pour ceux qui passent en atelier pro, savent-ils comment c'est fait ?
Et un autre fil m'intéresserait pour savoir comment chacun tient l'axe arr en appui sur les tendeurs au moment de serrer cet axe. (Le tournevis entre chaîne et couronne me chagrine un peu.)
A+